

Aller au contenu | Aller au menu | Aller à la recherche
18 juil. 2016
Par versatilerobot
31 déc. 2015
Par versatilerobot
VersatileRobot vous souhaite une très bonne année 2016.
Nul doute que de nouvelles réalisations robotiques sortiront des laboratoires pour nous émerveiller.

17 oct. 2015
Par versatilerobot - Robonumerique 2015
De retour du salon Robonumerique seconde édition avec beaucoup d'échanges et de plaisir à rencontrer un public friand d'informations sur l'avenir robotique.
Merci à la Mairie de Saint Quentin et ses élus pour le très bon accueil qu'ils nous ont fait.
L'association Caliban avait en charge d'animer le second étage et la mission a été parfaitement assurée 









14 oct. 2015
Par versatilerobot
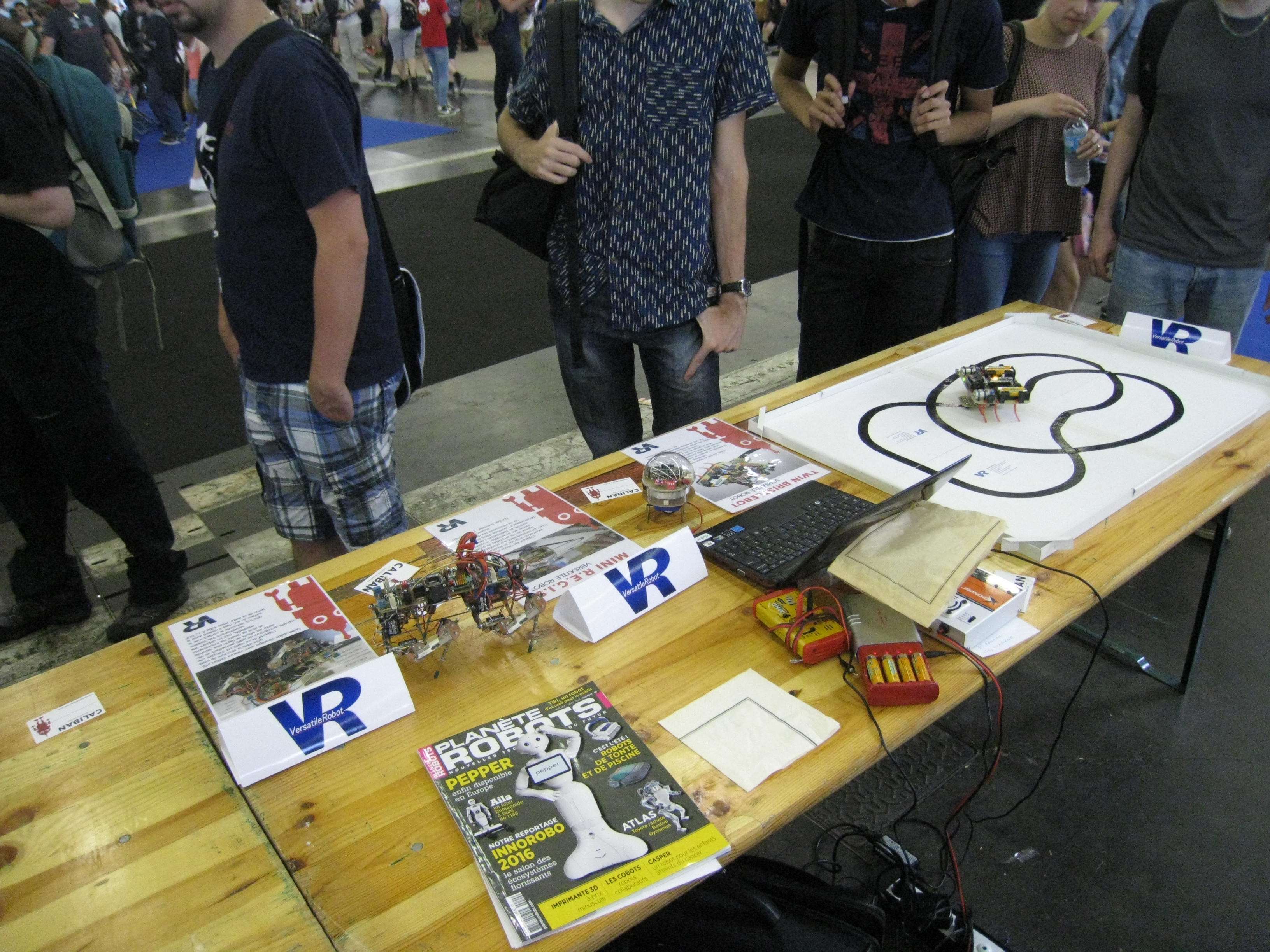
Rendez-vous les 15 et 16 Octobre sur le Pavillon Caliban de la robonumerique.
QRious; TwinBristleBot et Mini REGIS y seront en démos et bien d'autres créations des membres de l'association.

10 sept. 2015
Par versatilerobot - Qrious
De nouvelles videos de QRious, mon mini-quadrupede d'expérimentation à base de pico servos et Micro Load Cells.
22 mai 2015
Par versatilerobot - Qrious
Voici un nouvel axe de travail sur la mobilité. Après avoir exploré l’avance par vibrations avec TwinBristlebot ou le déplacement monocycle en contrôle d’équilibre sur une roue avec REGIS, voici mon quadrupède QRious.
Ce qu’il a d’original, c’est sa façon de percevoir son environnement. Il n’est pourvu que de capteurs d’efforts dans les pattes, mais ceux-ci font partie intégrale de la structure de la patte. Ainsi pas de transformation des efforts aux engrenages avant de réagir ; pas de perturbation de signal par les jeux mécaniques et l’opportunité d’employer des micro-servos alors qu’il faut actuellement des actionneurs beaucoup plus volumineux pour y intégrer l’électronique de mesure sur chaque axe. L’ensemble ne pèse que 405g batterie incluse.
Voici une vidéo de ses tous premiers pas. D’autres plus axées sur le contrôle d’effort suivront.